
研究の世界のネコ型ロボット 歩く仕組みの解明に貢献
犬や猫などを使った研究が難しくなっている。動物福祉の観点から、本物の動物を使う実験を控えることが求められるからだ。そこで、大阪大の研究チームは猫が歩く様子を再現するロボットを作り、ちゃんと歩くのに不可欠な神経回路の候補を特定した。
四足の動物が歩く仕組みは、まだしっかりとは解明されていない。これまでは、脳や脊髄(せきずい)の神経回路が複雑に関係すると考えられていた。
しかし最近の研究で、簡単な反射だけでうまく歩けることがわかってきた。反射とは、意識や意志とは関係なく刺激に対して体が反応すること。神経の司令塔である脳は関与せず、「現場」のみの判断で動くことを意味する。
工学研究科の大学院生だった谷川豊章さん、増田容一助教らの研究チームはこれまでの猫の歩き方の研究から、ひざがぐっと伸びてくると腰を伸ばし、逆に腰が伸びるとひざが伸びる、という「反射回路」が重要ではないかと考えていた。
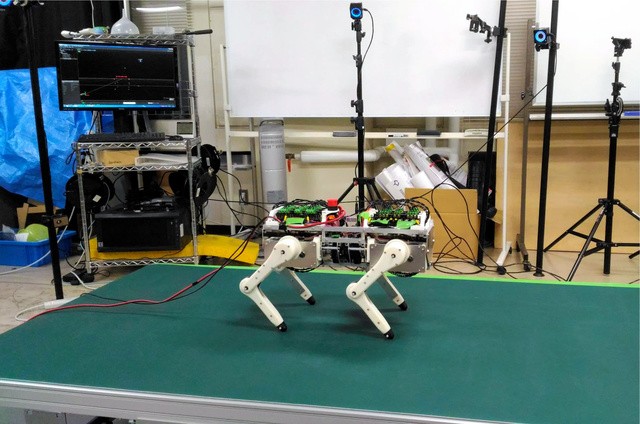
そこで、猫の神経回路や筋肉の特性を再現できるロボットを作り、この反射回路の仕組みを足に入れた。
すると、反射回路があるとちゃんと歩けるのに、回路の一部を切ると足並みが乱れてしまい、うまく歩けなくなることがわかった。
また1990年代に猫を使って行われた実験で、足首を伸ばす筋肉の神経を電気的に刺激すると、脚が地面についたままになり、次の一歩が踏み出せなくなる現象が起きたが、これもロボットで再現できた。
四足動物と同じように歩いているように見えるロボットはすでにある。増田さんによると、これらは産業機械の延長で動物が歩く仕組みとは異なり、脳に相当する高性能コンピューターを搭載して、自分の体の状態をすべて計算して動いている。
今回の猫型ロボットは動物が歩く仕組みを知るのが目的で、体の節々の反射回路のそれぞれは勝手に動いており、「脳」に相当する仕組みはない。
「歩き方が猫と完全に同じというわけではないが、これこそが猫の歩行を生み出すものという回路の候補を見つけた」と増田さんはいう。今後も同じような手法で四足動物の歩き方に迫っていきたいという。
論文はネット(https://doi.org/10.3389/fnbot.2021.636864)で読める。またロボットが歩く様子(https://youtu.be/-iLHRhvDccA)も見られる。(勝田敏彦)=朝日新聞デジタル2021年08月02日掲載+09:00>


sippoのおすすめ企画

猫を家族に迎えたいと思ったら、選択肢に保護猫も入れてみませんか?連載「保護猫の迎え方」では、7回にわたって保護猫の迎え方を詳しく紹介していきます。








